







RS10 Роботизированный тахеометр
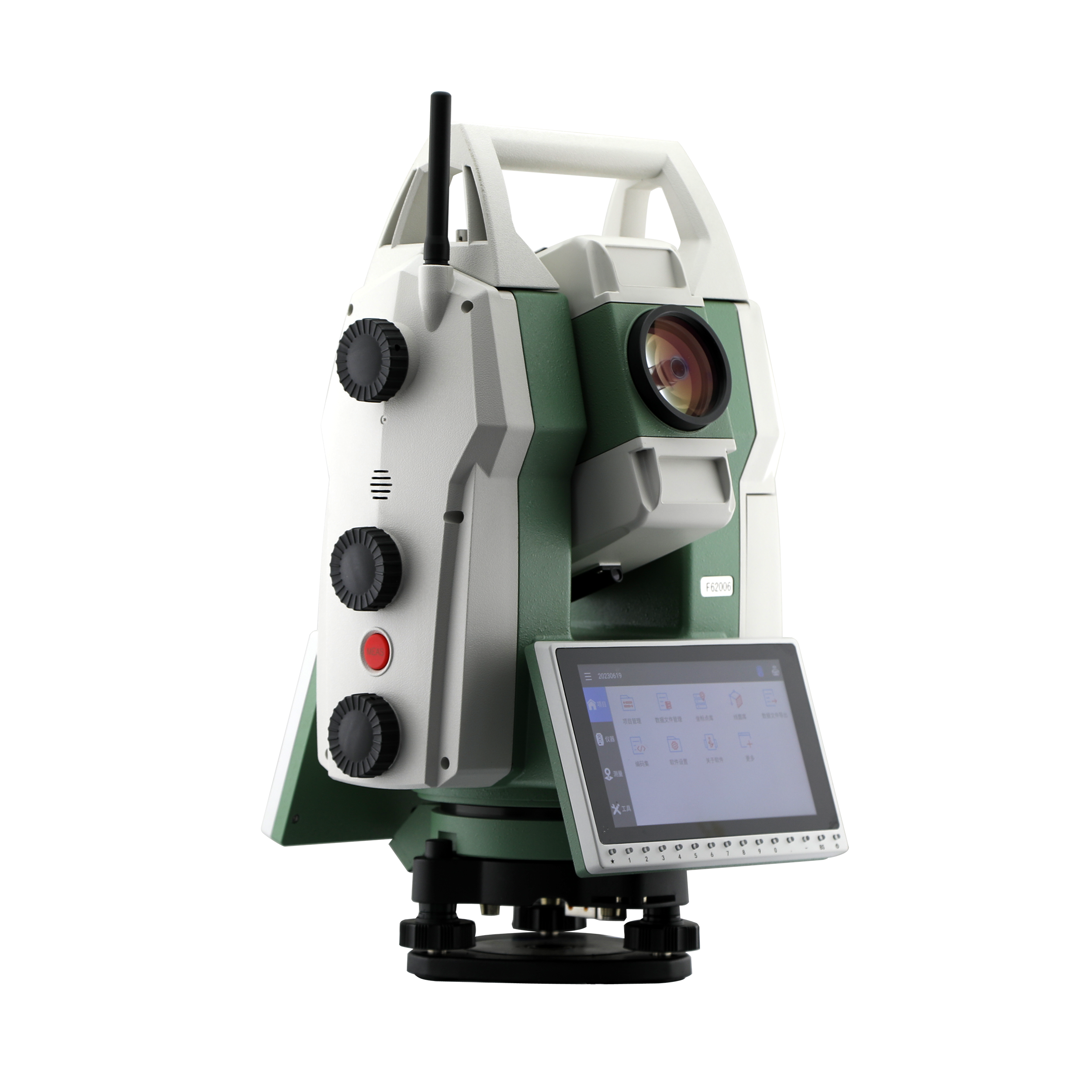


Роботизированный тахеометр RS10 имеет функцию автоматического наведения, с совершенно новым интеллектуальным алгоритмом для точного и автоматического исправления отклонений угловых показаний при наведении.
Эта технология позволяет роботизированному тахеометру быстро завершить поиск цели и точно определить центральное положение призмы, обеспечивая большую эффективность работы в различных рабочих условиях.
Роботизированная тахеометрическая система RS10, запущенная FOlF, представляет собой измерительную систему, интегрирующую автоматическое распознавание целей, автоматическое наведение, автоматическое измерение углов и расстояний, автоматическое отслеживание целей и автоматическую запись.
Переведите съемку в эпоху автоматизации и предоставьте геодезистам более эффективные и удобные автоматизированные решения для измерений. Инструмент предлагает более экономичное решение для мониторинга деформаций, измерения поперечных сечений и т.д. Он реализует автоматизацию от сбора полевых данных до расчета и вывода результатов, значительно повышая эффективность работы внутри и вне помещений, значительно снижая трудоемкость работы, устраняя различные ошибки, а также может снижать требования традиционных методов измерений к людям и оборудованию. Достаточно просто освоить основные операции, и вы можете приступать к работе внутри и вне помещений.
Электроприводная фокусировка
- Фокусировка устойчивая и удобная
В строенный компенсатор
- Высокоточный встроенный компенсатор размещен на оси, что делает компенсацию быстрее и стабильнее
Разнообразные интерфейсы связи ы
- Bluetooth, RS232 связь, 4G сети, что удовлетворяет потребности клиентов в дистанционном управлении команд
Технология прямого привода
- С новым поколением двигателей прямого привода максимальная скорость может достигать 180°/с, и он может реализовать высокоразрешающую тонкую настройку угла и высокоточное позиционирование
Богатые функции автоматизации меню измерения
- Автонаведение
- Автосопровождение
- Интеллектуальное распознавание
- Телеметрическое управление
Высокий уровень защиты, прочный и легкий в эксплуатации
- Он обладает высоким уровнем водостойкости и пылезащиты
Android-стиль g рафический интерфейс делает его удобным для вас к получить начать
- Встроенная операционная система Android
- Большой сенсорный экран и графический интерфейс
Пр офессиональные руководства по измерениям, чтобы помочь вам закончить широкий диапазон приложений с легкостью
Идеальные функции измерения и разметки, смещение измерения, резекция, измерение дороги, поперечное измерение, измерение противоположной стороны, множественные наблюдения и т.д.
- Практические функции инженерного применения, такие как измерение и проектирование дорог, поперечное сечение измерения и т.д.
- Моторный автоматический сканирование, автоматический мониторинг и т.д.
- Богатые технические функции COGO, вычисление обратных координат и трассировки, вычисление пересечений, вычисление углов, вычисление смещения, вычисление кривых, вычисление площади и т.д.
- Функции импорта и экспорта данных в различных распространенных форматах
|
Модель |
RS10 |
|
Телескоп |
|
|
Увеличение/Разрешение |
30×/3' |
|
Поле зрения |
1°30′ |
|
Минимальное расстояние фокусировки |
1.5м |
|
Эффективная апертура |
φ50 |
|
Изображение |
Прямое |
|
Угол Измерение |
|
|
Точность |
0.5' 1' |
|
Метод |
Абсолютный энкодер |
|
Единица |
360°(dms/d)/400gon/6400mil |
|
Мин. отображение |
0.1' |
|
Расстояние Измерение |
|
|
Точность Призма |
±(1+1×10⁶D)мм |
|
Отражающий лист |
±(2+2×10⁶D)мм |
|
Без отражателя |
±(3+2×10⁶D)мм |
|
Диапазон Стандартная призма(режим удаленной призмы) |
2~5000м |
|
Отражающий лист |
1~800м |
|
Мини призма |
2~1200м |
|
Без отражателя |
1~1000м |
|
Время Точный/Быстрый/Трек |
≤1.0с(начальные 1.5с)/≤0.5с(начальные 1.0с)/≤0.2с(начальные 1.0с) |
|
Единица |
м/фут/USft |
|
Мин. отображение |
0.0001м/0.001м(Точный、Быстрый),0.01м(Трек) |
|
ATR |
|
|
Рабочий диапазон |
5м~1000м |
|
Основная точность позиционирования |
±1.5мм@≤200м,±1.5'@>200м |
|
Время позиционирования (в поле зрения телескопа) |
0.5с~2с |
|
Мотор привод |
|
|
Макс.вращательная угловая скорость |
180°/с |
|
Мин.значение для микро-вращательного управления на низкой скорости |
1' |
|
T наклон компенсация |
|
|
Метод компенсации |
Интегрированный двухосевой тип |
|
Диапазон компенсации |
≥±6.0′ |
|
Уровень виала чувствительность |
|
|
Пластинчатая виала уровня |
30'/2mm |
|
Круглая виала уровня |
8'/2mm |
|
Лазер отвес |
|
|
Точность |
±1.0mm/0.8m~1.5m |
|
Лазерное пятно |
≤2.0mm/0.8m~1.5m |
|
Мощность |
|
|
Батарея |
11.1V,5800mAh литиевая батарея |
|
Время работы |
5h-8h |
|
Другое |
|
|
Бесконечный привод |
1 для горизонтального, 1 для вертикального |
|
Дисплей |
6-дюймовый сенсорный экран, разрешение 1280*720, двойные дисплеи, поддерживается работа с одним дисплеем |
|
Клавиатура |
15 клавиш внизу, подсветка+автоматическая чувствительность к свету |
|
Порт связи |
USB к RS232, порт USBC, порт USB HOST, стандарт ближнего BT, дальний BT (опционально), различные сети (4G опционально) |
|
Поддержка функций |
Клавиша триггера/выход звукового сигнала/динамик/карта TF/датчик температуры и давления воздуха/облачное обновление |
|
Система |
ANDROID11.0, четырехъядерный 64-битный ARM A55 CPU 2GHz, 8GB+128GB |
|
Степень защиты |
IP55(IEC60529) |
|
Диапазон рабочих температур |
-20℃~+50℃ |
Связанные продукты













Свяжитесь с нами
Информация о продукте
Количество
Единица
Штука
Поддержка заказа образцов, индивидуальная настройка, оптовая продажа напрямую и полная оплата. Если у продукта, который вы ищете, нет соответствующего индивидуального содержания, пожалуйста, заполните форму ниже, чтобы связаться с нами, и мы ответим как можно скорее.