







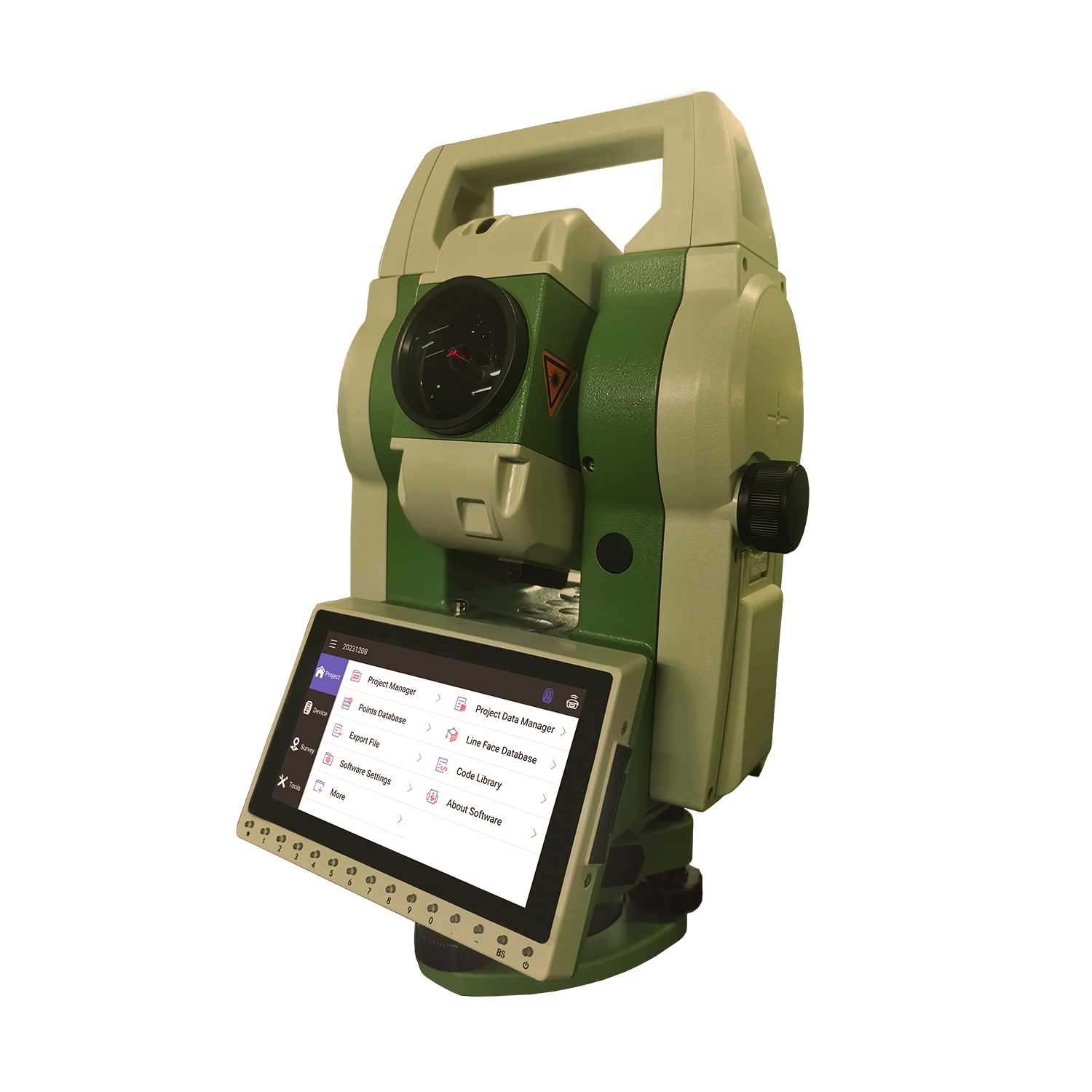
RTS362N Android Total Station


-
Умная операционная система
- Android 11, открытая платформа, сильная расширяемость, настройка приложений в соответствии с различными отраслями
-
Высокая производительность, простота в использовании
- Четырехъядерный процессор, структура ARM Cortex-A55, базовая частота до 2 ГГц
-
Различные способы связи
- Bluetooth, wifi, USB-диск, Type-C, 4G сеть (опционально)
-
Большая память и хранилище
- 4 ГБ ОЗУ + 32 ГБ ПЗУ (8 ГБ + 128 ГБ, расширяемое), плавная работа
-
Большой HD экран, сенсорный
- 5.5-дюймовый сенсорный экран 720P, высокое разрешение 720*1280, устойчивость к яркому свету, четкий и ясный
-
Длительное время работы батареи, эффективный и умный
- Литий-ионный аккумулятор высокой емкости, умное управление батареей, поддерживает переключение отображения между одной и двумя гранями, долгие рабочие часы
-
Продвинутая система измерения углов
- Дизайн системы измерения углов с CCD массивом, эффективное устранение системных ошибок
-
Многофункциональное программное обеспечение для съемки на Android
- Новое программное обеспечение для съемки на Android Surpad и множество приложений для съемки, значительно облегчающих полевые работы
-
Легкая и быстрая передача данных
- Поддерживает быстрый импорт и экспорт файлов csv/txt/dat, особенно загрузку и разбивку CAD чертежей, доступно обновление OTA
-
Графическая разбивка, простая как печать
- Поддерживает графическую разбивку CAD более эффективным способом
|
Режим л |
RTS010N |
RTS362N |
|
Угол Измерение |
||
|
Точность |
1' |
2' |
|
Метод |
Абсолютный энкодер |
|
|
Единица |
360°(dms/d)/400gon/6400mil |
|
|
Главный дисплей |
0.1' |
|
|
Расстояние Измерение мера |
||
|
Точность |
±(1+1X10⁶D)мм ±(2+2X10°D)мм |
|
|
Danoe Безотражательный |
2.0~1000м |
|
|
Отражающий лист |
2.0~800м |
|
|
Стандартная призма (режим удаленной призмы) |
2.0~5000м |
|
|
Время Точный/Трекинг |
2.0с/0.5с |
|
|
Единица |
м/фут/US фут |
|
|
Мин . дисп укладка |
0.0001м |
|
|
Телескоп |
||
|
Увеличение/Разрешение |
30x/3' |
|
|
Поле зрения |
1°30' |
|
|
Минимальное расстояние фокусировки |
1.0м |
|
|
Эффективная апертура |
φ45m Телескоп φ50mm EDM |
|
|
Визуализация |
Прямой |
|
|
Компенсация наклона |
||
|
Метод компенсации |
Двухосевой |
|
|
Диапазон компенсации |
±3.0′ |
|
|
Чувствительность уровня пузырька |
||
|
Пластина уровень пузырек |
30'/2mm |
|
|
Круглый уровень пузырька |
8'/2mm |
|
|
Лазерный отвес |
||
|
Точность |
±1.0mm/0.8m~1.5m |
|
|
Лазерное пятно |
≤2.0mm/0.8m~1.5m |
|
|
Питание |
||
|
Батарея |
7.4V,5200mAh литиевая батарея |
|
|
Время работы |
≥8ч |
|
|
Другое |
||
|
Память |
4G RAM+32G ROM(опционально 8G+128G) |
|
|
CPU |
Четырехъядерный 64-битный ARM A55 CPU 2GHZ |
|
|
Дисплей |
5.5-дюймовый сенсорный экран, разрешение 720*1280, двойной или одинарный дисплей |
|
|
Клавиатура d |
15 клавиш внизу |
|
|
Порт связи |
USB HOST порт, USB Type C, Bluetooth, WIFI, RS-232(опционально 4G модуль) |
|
|
Backight adjustme/tueim p.tod lu resture senso |
Поддержка |
|
|
H-V движения |
Блокировка привода Бесконечный привод |
|
|
Сеть |
Различные сети (4G опционально) |
|
|
Обновление системы/Обновление приложения и выпуск |
Поддержка облака |
|
|
Интерфейс стороннего программного обеспечения/Стороннее программное обеспечение |
Виртуальный последовательный порт/BaseMeasure,SurPAD и т.д. |
|
|
Программная система |
ANDROID 11.0 |
|
|
Степень защиты |
IP55(IEC60529) |
|
|
Рабочий температурный диапазон |
-20℃~+50℃ |
|
|
Диапазон температур хранения |
-40℃~+55℃ |
|
Связанные продукты













Свяжитесь с нами
Информация о продукте
Количество
Единица
Штука
Поддержка заказа образцов, индивидуальная настройка, оптовая продажа напрямую и полная оплата. Если у продукта, который вы ищете, нет соответствующего индивидуального содержания, пожалуйста, заполните форму ниже, чтобы связаться с нами, и мы ответим как можно скорее.